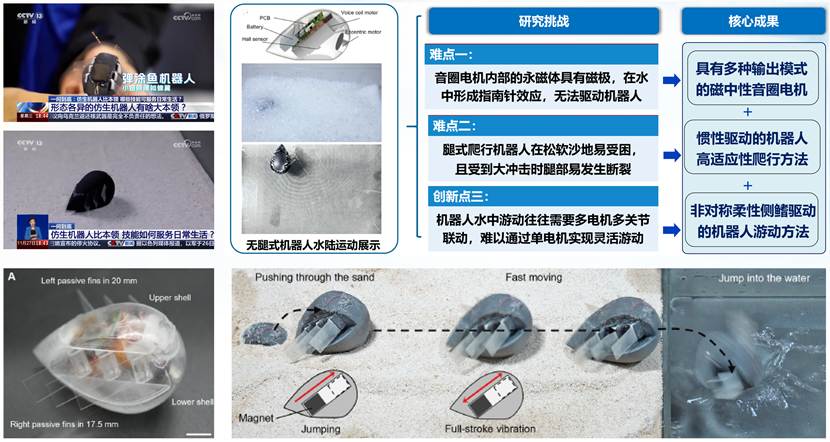
代表性成果1——惯性驱动的无腿式水陆两栖机器人
研制了可调节振动惯性的磁中性音圈电机,并通过改变线性振动模式驱动水陆两栖机器人实现高适应性地面运动和灵活水面运动,无腿式封闭外壳设计使机器人能够轻松穿梭泥沙、碎石地带,受到重压与掩埋也能自行脱困,相关成果被CCTV报道,并发表于子刊Science Advances上。
发表论文:
Lingqi Tang†, Yongzun Yang†, BingLi*, Bingfu Zhang*, Qiguang He*, Hongliang Ren* and Yao Li*, “Inertia-driven amphibious robot with asymmetric micro undulatory fin arrays”, Science Advances, 2026.
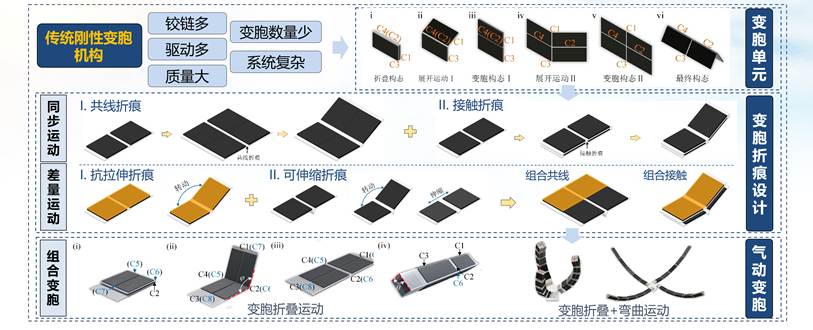
代表性成果2——空间薄膜式可展开机构关键技术
(1)基于多重变胞折纸单元,设计了具有同步运动和差动特性的刚柔混合变胞折痕,提出了可实现单驱动控制多重序列运动的多重变胞机构构型设计方法,相关成果发表在Science合作期刊Research上。
发表论文:
Sen Wang, Peng Yan, Hailin Huang, Ning Zhang, Bing Li. “Inflatable Metamorphic Origami”. Research, 2023(4): 0133.
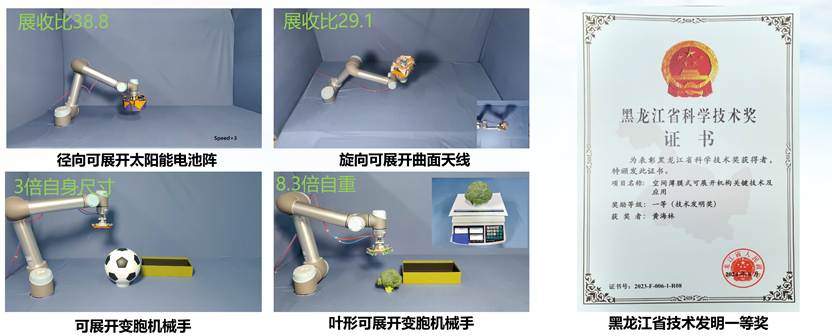
(2)提出多重序列运动气动变胞机构设计方法,具备单驱动序列运动控制特性,设计出具有多重变胞特性的轻质大折展比平面径向和曲面旋向可展开抓取手,研究成果“空间薄膜式可展开机构关键技术及应用”获得2023年度黑龙江省技术发明一等奖。
代表性成果3——研制国际首个空间柔性机械臂
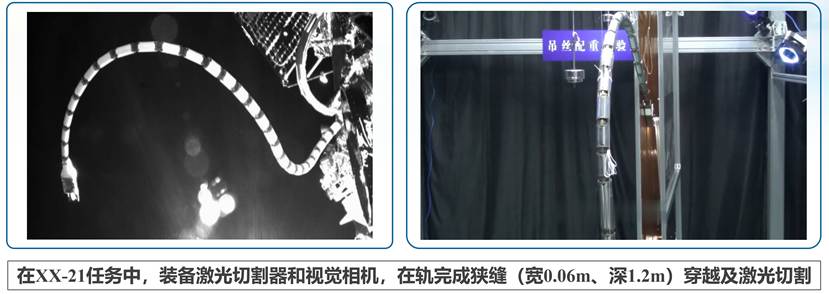
(1)针对在轨狭小、高度拥挤空间灵巧作业的迫切需求,提出了绳簇主被动混合驱动方法、位-型协同运动动力学规划、力-位-型融合控制方法,研制成功国际首个空间柔性机械臂,用于航天型号(XX-21)任务,完成在轨狭缝穿越与激光切割。
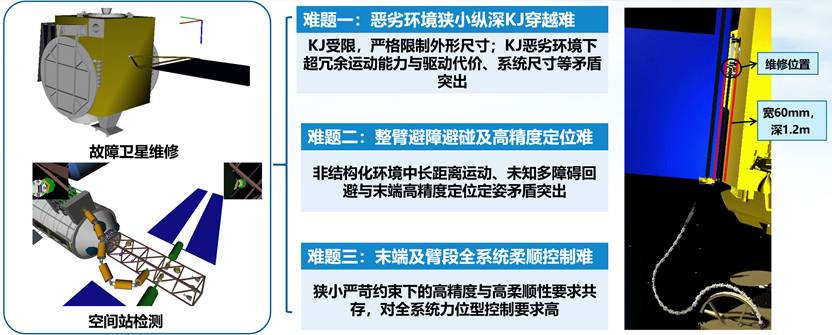
(2)研制成功国际首个空间柔性机械臂,全长3.5m,最小外径0.036m,精度2.16mm,仅通过15个电机实现30个关节、60轴控制,具有100倍长径比和10倍变刚度能力;在轨完成了国际狭缝穿越及激光切割试验,实现厘米级狭小空间纵深穿越及操作能力;成果获JS技术发明一等奖(2024)。
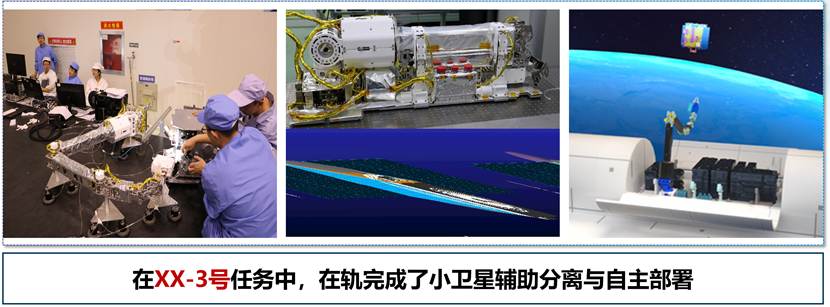
代表性成果4——研制国际首个可重复使用绳驱敏捷机械臂
针对非合作大动量目标在轨捕获及操控需求,研制成功国际首个可重复使用绳驱敏捷机械臂,解决了高敏捷操作与与低扰动运动的矛盾问题。机械臂长2m,7自由度、整臂质量<22kg、绳驱臂段质量<6.5kg,折展比<1:2.5,末端速度大于900mm/s,操控对基座姿态扰动小于0.005°/s。作为可返回式航天器的载荷,在轨运行后按预定计划成功返回,期间开展了可重复使用技术验证及空间科学实验,为和平利用太空提供技术支撑。
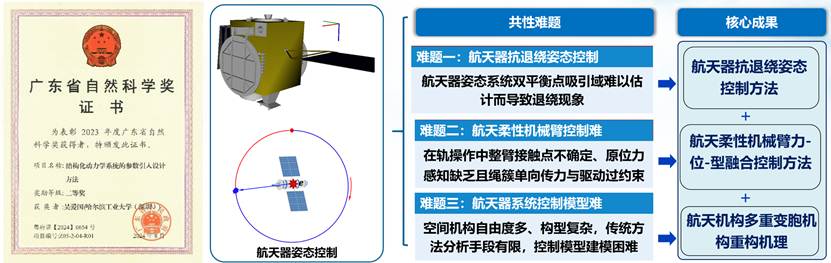
代表性成果5——航天器机构/结构系统控制理论与方法
针对航天器系统在控制模型、在轨姿态控制、机械臂控制等方面难题,提出双平衡点航天器系统姿态控制律的参数引入设计方法、力-位-型融合控制方法、多重变胞机构重构模型,建立航天器机构/结构系统控制理论与方法体系,项目成果获得广东省自然科学二等奖。
发表论文:
A Fundamental matrix based approach to design predictor- based control laws fordiscrete-time systems with state and inputdelays,Automatica,Volume 155, September 2023.
Fixed-time adaptive fault- tolerant tracking control for uncertain strict- feedback nonlinear systems via command filtered backstepping,International Journal of Robust and Nonlinear Control,Volume34, Issue8, May 2024.
Anti-unwinding attitude maneuver control with predefined time for rigid spacecraft with input saturation,International Journal of Robust and Nonlinear Control,Volume34, Issue13, September 2024.
代表性成果6——无人集群系统分布式协同控制
(1)针对无人集群系统智能体种类多、数量多、信息交互受限等难题,建立了非对称有向图中非线性群体系统一致性分析的统一框架,发现了联系有向图和无向图的一般性条件,提出了全分布式的一致性算法,相关成果发表在控制学科顶刊IEEE Transactions on Automatic Control上,并获得2025年广东省自然科学二等奖。
发表论文:
Yanhua Yang, Jie Mei*, and Guangfu Ma, “Fully Distributed Event-Triggered Control for Containment of Fully-Heterogeneous MASs using Filter-based RL”, IEEE Transactions on Automatic Control, 2025.
Kaixin Tian, Jie Mei*, Congcong Tian, and Guangfu Ma, “Interval Consensus of Heterogeneous High-order Multi-agent Systems”, IEEE Transactions on Automatic Control.
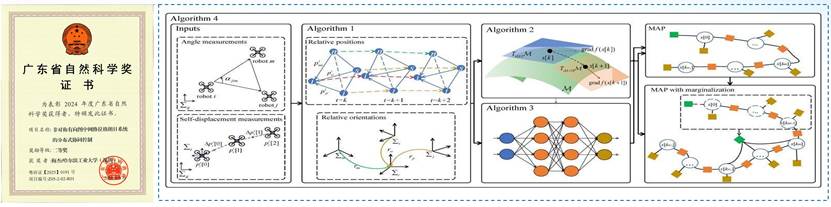
(2)针对无人集群系统的分布式自主相对定位问题,提出了线性定位算法,深入分析了该算法的性能并给出了分布式计算方法;通过融合机器人间的角度测量与自位移测量信息,在强噪声环境下实现了高精度的多机器人相对定位,相关成果发表在控制学科顶刊Automatica和机器人顶刊International Journal of Robotics Research 等期刊。
发表论文:
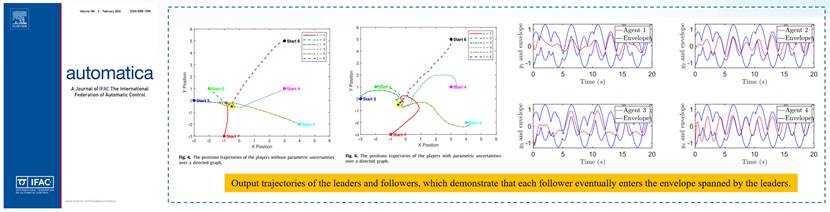
Congcong Tian, Jie Mei*, Kaixin Tian, and Guangfu Ma, "Distributed Adaptive Nash Equilibrium Seeking for Games of Heterogeneous High-Order Players over a Directed Graph", Automatica, 2025.
Chenyang Liang, Liangming Chen, Baoyi Cui, and Jie Mei*, “3-D Relative Localization for Multi-Robot Systems with Angle and Self-Displacement Measurements, International Journal of Robotics Research, 2025.